






























")
, les réseaux sociaux au secours de la conservation des cénotes")



































Installée à Lattes depuis 2016, la jeune société Submarine Open Technologies travaille d’arrache-pied pour créer le premier GPS autonome sous-marin sans être relié à la surface. En constant développement depuis sa création, Submarine Open Technologies est aujourd’hui à la recherche d’investisseurs.
COMUNIQUE DE PRESSE
SUBMARINE OPEN TECHNOLOGIES conçoit un navigateur GPS pour plongeur. Aujourd’hui la phase de prototypage est bien avancée, elle fait valider sa technologie par des plongeurs professionnels tels que des sapeurs-pompiers plongeurs et des scaphandriers.
Les testeurs ont ainsi pu utiliser un navigateur pour se diriger rapidement vers des coordonnées GPS précises enregistrées avant la plongée. Pour la première fois, ils ont pu suivre leurs déplacements en temps réel et s’orienter malgré une visibilité de moins de 1 mètre. Ces tests ont eu lieu en eau intérieure et en zone portuaire.

Il peut arriver en plongée que l’on perde du temps pour rejoindre un site d’opération dont les coordonnées sont pourtant connues.
Pour un archéologue, il est important de reprendre les recherches à l’endroit précis où elles avaient été interrompues. Il faut éviter d’une part de passer plusieurs fois au même endroit mais également de laisser des zones inexplorées.
D’un autre côté, les pompiers luttent contre le temps et contre des conditions difficiles (courant, visibilité, froid). Aujourd’hui des unités d’intervention utilisent un sonar pour localiser les victimes sur une carte. La difficulté pour la rejoindre est que le plongeur ne voit pas sa propre position évoluer en temps-réel.
Il s’agit d’un problème global de localisation dans l’eau. Le GPS ne peut pas le résoudre. En effet, les ondes satellitaires se dissipent dans l’eau.
Pour répondre à cette problématique, Submarine Open Technologies travaille depuis 2015 sur une technologique innovante de localisation sous-marine accessible aux plongeurs.
L’équipe de recherche et développement – également associée dans la société – est issue du milieu de la navigation par satellite. Elle a opéré un transfert technologique qui a abouti à la conception d’un prototype de navigateur au format tablette destiné aux plongeurs professionnels (industriels, scientifiques et secouristes).

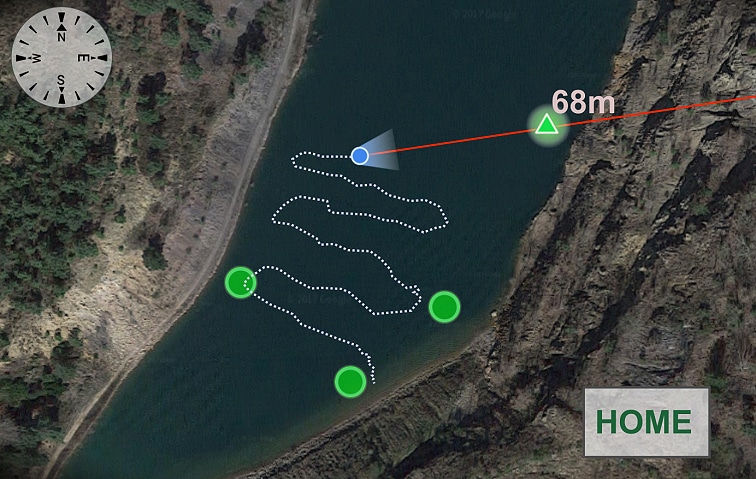
Techniquement, des balises flottantes réceptionnent les signaux GPS et communiquent par acoustique avec le navigateur porté par le plongeur.
Le plongeur peut ainsi :
– voir sa position en temps réel sur fond de carte
– voir son parcours de plongée
– enregistrer et voir des points d’intérêt (POI)
– exporter la carte, la trajectoire et l’ensemble des POI sur ordinateur.
La société fait tester et valider ces fonctionnalités et les performances par des plongeurs bêta testeurs.

Plan d’eau d’entrainement de Villefranche-sur-Saône (Rhône)
Le premier partenaire a été la caserne de sapeurs-pompiers du SDMIS de Lyon avec qui une convention a été signée en 2017. Courant 2018 une démonstration a eu lieu sur le plan d’eau d’entrainement de Villefranche-sur-Saône (cf vidéo).http:// https://www.youtube.com/watch?v=U85Qs_fPIsE
Les sapeurs-pompiers se sont déplacés à vitesse réduite (0.6 nœud) sur une zone de 70m de rayon pour 10 mètres de profondeur. Dans ces conditions, leur position était précise au mètre et calculée 5 fois par seconde.
L’utilisation d’un écran rétroéclairé a permis la lisibilité claire de la position du plongeur sur un fond de carte « IGN ».
Les plongeurs ont également testé la réactivité de l’écran tactile (breveté) sous l’eau pour naviguer rapidement dans les menus. Ce type d’interaction sera utile pour certains métiers (changer de fond de carte, annoter des POI, prendre des notes, envoyer des messages vers la surface…).
La convention prévoit d’autres tests jusqu’à la validation des performances du matériel pour leur cas d’utilisation en 2019.

Début 2019, la société de construction d’ouvrages maritimes et fluviaux Géocéan a également testé le navigateur GPS en zone portuaire.
Le navigateur était cette fois porté par un scaphandrier équipé d’un narguilé. La mission était de répertorier des points spécifiques immergés le long du passage d’une future conduite.
Pour faciliter le guidage du plongeur, les plans d’installation de la future conduite ont été téléchargés. Le plongeur voyait ses déplacements en temps-réel sur ces plans. L’exactitude de la position a été vérifiée à partir de repères sous-marins géoréférencés.
La position calculée est restée stable même lors de passages de remorqueurs et à proximité de structures (certains POI étaient sur la façade du quai).
Les plongeurs ont également validé l’utilisation du rétroéclairage pour afficher des plans techniques en faible visibilité.
Suite à cette expérience, nous poursuivrons les démonstrations auprès de sociétés de travaux immergés (dont Géocéan) et de centres de formation de scaphandriers.

En 2019, les objectifs visés par Submarine Open Technologies sont :
– Augmenter les performances du prototype
– Faire tester et valider ces performances par des professionnels.
Puis en 2020, ils sont :
– Industrialiser une première version de navigateur professionnel
– Lancer le prototype du navigateur loisir suivant le même processus de validation par des bêta testeurs.
Aujourd’hui Submarine Open Technologies recherche des investisseurs pour finaliser la phase de prototypage ‘pro’. Les plongeurs souhaitant participer à cette aventure peuvent écrire à contact@submarine-open-technologies.fr
A propos de Submarine Open Technologies :
– La société est spécialisée dans la conception d’équipements de navigation.
– Son capital social s’élève à 149 000€. Elle compte 5 effectifs.
– Située à Lattes depuis 2016 et accompagnée par le BIC de Montpellier, elle a été créée à Alès après son incubation à l’école des Mines d’Alès.
La société a bénéficié de différents soutiens à l’innovation : Lauréat Emergence du concours i-lab de la BPIfrance, programme d’incubation de l’Agence Spatiale Européenne, aides de la Région Occitanie dont Créalia.







{kind=link}